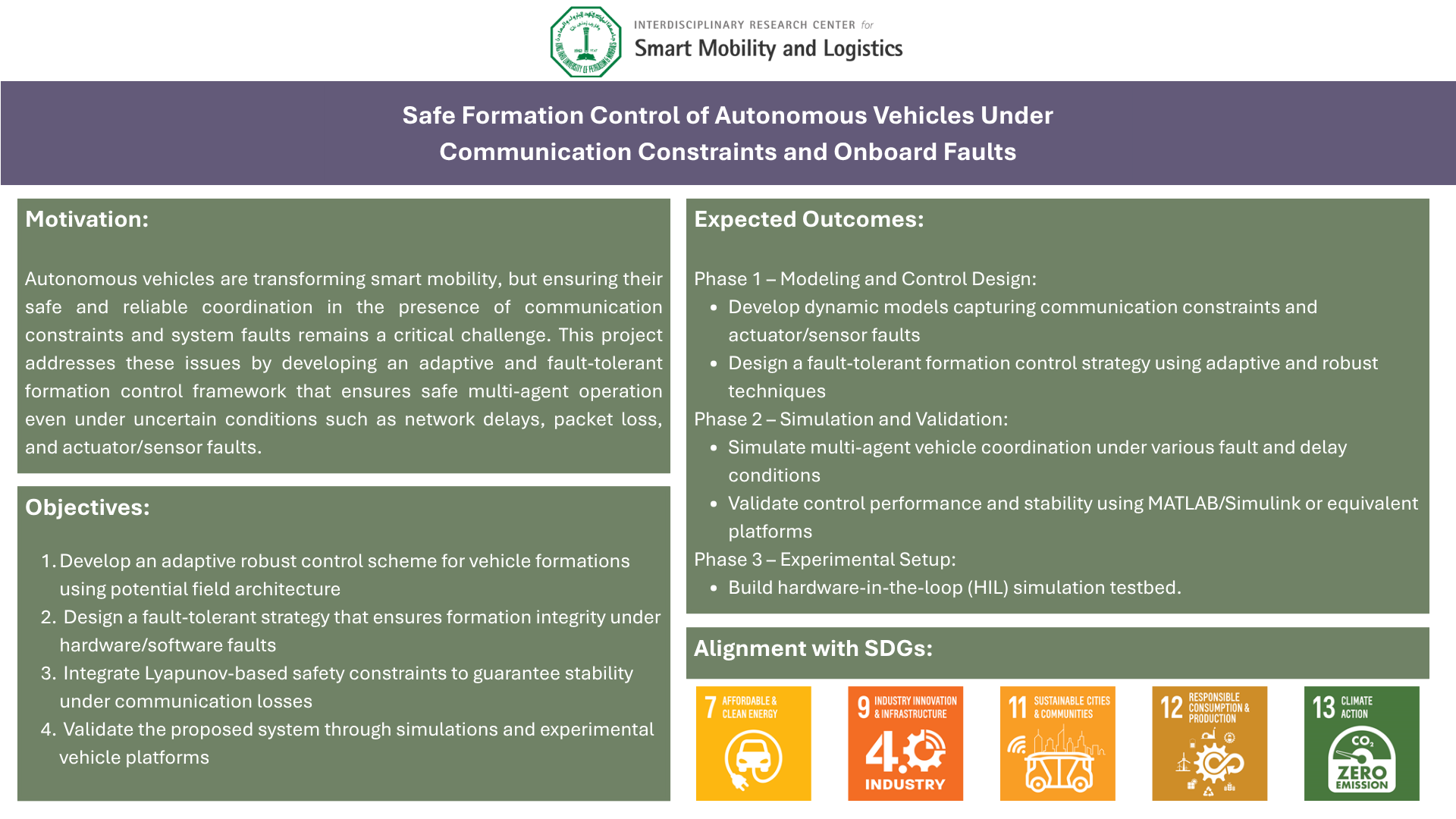
Safe Formation Control of Autonomous Vehicles Under Communication Constraints and Onboard Faults
PI: Dr. Nezar Mohammed Alyazidi
CoI: Dr. Mahmoud Abouomar, Dr. Ahmed Eltayeb, Dr. Sami Elferik
CoI: Dr. Mahmoud Abouomar, Dr. Ahmed Eltayeb, Dr. Sami Elferik