Research Innovation
Research Centers
Interdisciplinary Research Centers (IRCs)
IRC for Advanced Materials
IRC for Intelligent Manufacturing and Robotics
IRC for Membranes and Water Security
IRC for Intelligent Secure Systems
IRC for Smart Mobility and Logistics
IRC for Refining and Advanced Chemicals
IRC for Sustainable Energy Systems
IRC for Hydrogen Technologies and Carbon Management
IRC for Construction and Building Materials
IRC for Communication Systems and Sensing
IRC for Finance and Digital Economy
Center for Integrative Petroleum Research
IRC for Aviation and Space Exploration
IRC for Industrial Nuclear Energy
IRC for Biosystems and Machines
Applied Research Centers (ARCs)
ARC for Environment and Marine Studies
ARC for Metrology, Standards, and Testing
ARC for Nonprofit and Social Development
Petroleum Conversion Research Center
Joint Research Centers (JRCs)
SDAIA-KFUPM Joint Research Center for Artificial Intelligence
KACST Center for Energy Efficiency
KACARE Center for Energy Research
Research Support
Deanship of Research
Core Research Facilities
CONSORTIA
Consortium for a Sustainable Future
Consortium for Hydrogen Future
Chair Professors
Coming Soon
Visiting Scholars & Postdocs
Coming Soon
About us
Overview
Vision & Mission
Our Scope
Director's Message
People
Research
Research Themes
Patents
Publications
Projects 2025
Projects 2024, 2023
Partnership
Industrial Collaboration
Facilities
News
Events
Contact us
Join us
Project Details
Home
Research
Projects Detail
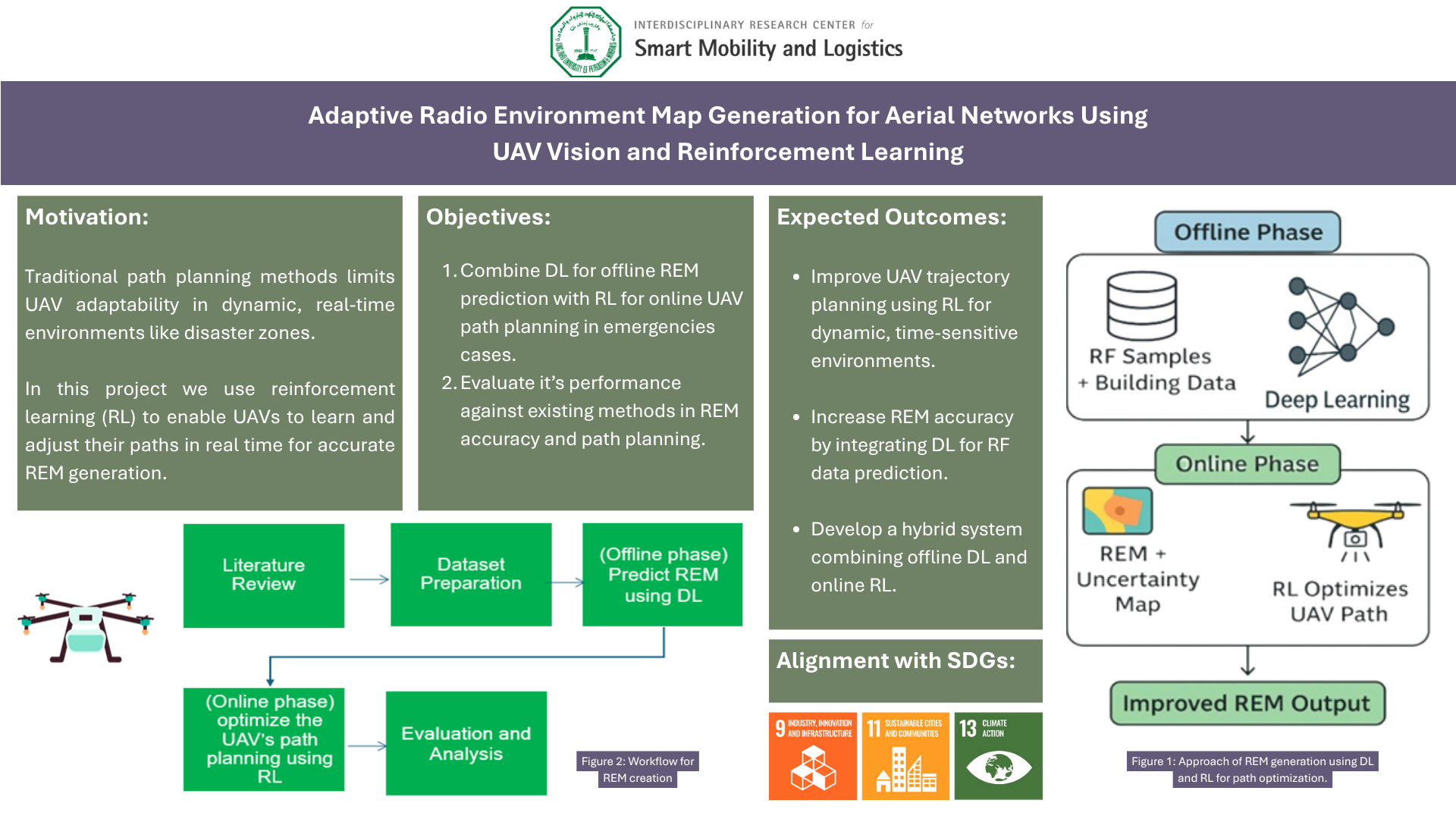
Adaptive Radio Environment Map Generation for Aerial Networks Using UAV Vision and Reinforcement Learning
PI:
Dr. Tarek Sheltami
CoI:
Dr. Ashraf Mahmoud